Selected Publications
Distributed Design of Ultra Large-Scale Control Systems: Progress, Challenges, and Prospects
Leonardo Pedroso, Pedro Batista and W.P.M.H. Heemels
Annual Reviews in Control, 2025
Abstract
The transition from large centralized complex control systems to distributed configurations that rely on a network of a very large number of interconnected simpler subsystems is ongoing and inevitable in many applications. It is attributed to the quest for resilience, flexibility, and scalability in a multitude of engineering fields with far-reaching societal impact. Although many design methods for distributed and decentralized control systems are available, most of them rely on a centralized design procedure requiring some form of global information of the whole system. Clearly, beyond a certain scale of the network, these centralized design procedures for distributed controllers are no longer feasible and we refer to the corresponding systems as ultra large-scale systems (ULSS). For these ULSS, design algorithms are needed that are distributed themselves among the subsystems and are subject to stringent requirements regarding communication, computation, and memory usage of each subsystem. In this paper, a set of requirements is provided that assures a feasible real-time implementation of all phases of a control solution on an ultra large scale. State-of-the-art approaches are reviewed in the light of these requirements and the challenges hampering the development of befitting control algorithms are pinpointed. Comparing the challenges with the current progress leads to the identification and motivation of promising research directions.
BibTeX
@article{PedrosoBatistaEtAl2025ULSS,
author = {Leonardo Pedroso and Pedro Batista and W. P. M. H. Heemels},
title = {Distributed design of ultra large-scale control systems: Progress, Challenges, and Prospects},
journal = {Annual Reviews in Control},
year = {2025},
volume = {59},
pages = {100987},
doi = {10.1016/j.arcontrol.2025.100987}
}
Leonardo Pedroso, Pedro Batista and W.P.M.H. Heemels
arXiv preprint, 2026
Abstract
Emerging large-scale engineering systems rely on distributed fusion for situational awareness, where agents combine noisy local sensor measurements with exchanged information to obtain fused estimates. However, at the sheer scale of these systems, tracking cross-correlations becomes infeasible, preventing the use of optimal filters. Covariance intersection (CI) methods address fusion problems with unknown correlations by minimizing worst-case uncertainty based on available information. Existing CI extensions exploit limited correlation knowledge but cannot incorporate structural knowledge of correlation from multiple sources, which naturally arises in distributed fusion problems. This paper introduces Overlapping Covariance Intersection (OCI), a generalized CI framework that accommodates this novel information structure. We formalize the OCI problem and establish necessary and sufficient conditions for feasibility. We show that a family-optimal solution can be computed efficiently via semidefinite programming, enabling real-time implementation. The proposed tools enable improved fusion performance for large-scale systems while retaining robustness to unknown correlations.
BibTeX
@misc{PedrosoBatistaEtAl2026OCI,
author = {L. Pedroso and P. Batista and W. P. M. H. Heemels},
title = {Overlapping Covariance Intersection: Fusion with Partial Structural Knowledge of Correlation from Multiple Sources},
note = {arXiv preprint arXiv:2603.16768},
year = {2026},
doi = {10.48550/arXiv.2603.16768}
}

Evolutionary Dynamics in Continuous-time Finite-state Mean Field Games: Equilibria and Stability
Leonardo Pedroso, Andrea Agazzi, W.P.M.H. Heemels, Mauro Salazar
arXiv preprint, 2025
Abstract
We study a dynamic game with a large population of players who choose actions from a finite set in continuous time. Each player has a state in a finite state space that evolves stochastically with their actions. A player's reward depends not only on their own state and action but also on the distribution of states and actions across the population, capturing effects such as congestion in traffic networks. While prior work in evolutionary game theory has primarily focused on static games without individual player state dynamics, we present the first comprehensive evolutionary analysis of such dynamic games. We propose an evolutionary model together with a mean field approximation of the finite-population game and establish strong approximation guarantees. We show that standard solution concepts for dynamic games lack an evolutionary interpretation, and we propose a new concept - the Mixed Stationary Nash Equilibrium (MSNE) - which admits one. We analyze the relationship between MSNE and the rest points of the mean field evolutionary model and study the evolutionary stability of MSNE.
BibTeX
@misc{PedrosoAgazziEtAl2025MFGAvg,
author = {Leonardo Pedroso and Andrea Agazzi and W. P. M. H. Heemels and Mauro Salazar},
title = {Evolutionary Dynamics in Continuous-time Finite-state Mean Field Games - {Part I}: Equilibria},
note = {arXiv preprint arXiv:2511.01452},
year = {2025},
doi = {10.48550/arXiv.2511.01452}
}
International Journal Papers
Abstract
The transition from large centralized complex control systems to distributed configurations that rely on a network of a very large number of interconnected simpler subsystems is ongoing and inevitable in many applications. It is attributed to the quest for resilience, flexibility, and scalability in a multitude of engineering fields with far-reaching societal impact. Although many design methods for distributed and decentralized control systems are available, most of them rely on a centralized design procedure requiring some form of global information of the whole system. Clearly, beyond a certain scale of the network, these centralized design procedures for distributed controllers are no longer feasible and we refer to the corresponding systems as ultra large-scale systems (ULSS). For these ULSS, design algorithms are needed that are distributed themselves among the subsystems and are subject to stringent requirements regarding communication, computation, and memory usage of each subsystem. In this paper, a set of requirements is provided that assures a feasible real-time implementation of all phases of a control solution on an ultra large scale. State-of-the-art approaches are reviewed in the light of these requirements and the challenges hampering the development of befitting control algorithms are pinpointed. Comparing the challenges with the current progress leads to the identification and motivation of promising research directions.
BibTeX
@article{PedrosoBatistaEtAl2025ULSS,
author = {L. Pedroso and P. Batista and W. P. M. H. Heemels},
title = {Distributed design of ultra large-scale control systems: Progress, Challenges, and Prospects},
journal = {Annual Reviews in Control},
year = {2025},
volume = {59},
pages = {100987},
doi = {10.1016/j.arcontrol.2025.100987}
}
Abstract
Most applied research on transport justice focuses on evaluating existing systems, while transport planning typically relies on utilitarian objectives such as minimizing average travel time, without accounting for fairness. This paper starts to bridge this gap by applying different principles of justice to the operational planning of transport systems. We use an intermodal Autonomous Mobility-on-Demand system - centrally controlled self-driving vehicles cooperating with public transit and active modes - as a case study to improve conditions for users without access to private cars. We define and compare justice metrics that differ in both their distributive principle and the good of concern: utilitarianism applied to travel time; and sufficientarianism applied to either travel time or accessibility. A real-world case study in Eindhoven, the Netherlands, shows that these principles lead to different planning outcomes, highlighting the need for broader debate on their implications. The results underscore the value of transdisciplinary and conceptually informed approaches to transport planning and system optimization.
BibTeX
@article{SalazarBetancurEtAl2025,
author = {M. Salazar and S. Betancur Giraldo and F. Paparella and L. Pedroso and K. Martens},
title = {Mobilizing transport justice: a sufficientarian optimization framework for intermodal mobility systems},
journal = {npj Sustainable Mobility and Transport},
year = {2025},
volume = {2},
number = {1},
pages = {43},
doi = {10.1038/s44333-025-00056-2}
}

Abstract
This paper presents a framework to incorporate ride-pooling from a mesoscopic point of view, within time-invariant network flow models of Mobility-on-Demand systems. The resulting problem structure remains identical to a standard network flow model, a linear problem, which can be solved in polynomial time. In order to compute the ride-pooling assignment, which is the matching between two or more users so that they can be pooled together, we devise a polynomial-time knapsack-like algorithm that is optimal w.r.t. the minimum vehicle travel time with users on-board. Finally, we conduct two case studies of Sioux Falls and Manhattan, where we validate our models against state-of-the-art results, and we quantitatively highlight the effects that maximum waiting time and maximum delay thresholds have on the vehicle hours traveled, overall pooled rides and actual delay experienced. Last, we show that allowing for four people ride-pooling can significantly boost the performance of the system.
BibTeX
@article{PaparellaPedrosoEtAl2024Ride-pooling,
author = {F. Paparella and L. Pedroso and T. Hofman and M. Salazar},
title = {A Time-invariant Network Flow Model for Ride-pooling in Mobility-on-Demand Systems},
journal = {IEEE Transactions on Control of Network Systems},
year = {2025},
volume = {12},
number = {1},
pages = {906-917},
doi = {10.1109/TCNS.2024.3431411}
}
Abstract
To cope with uncertain traffic patterns and traffic models, traffic-responsive signal control strategies in the literature are designed to be robust to these uncertainties. These robust strategies still require sensing infrastructure to implement traffic-responsiveness. In this paper, we take a novel perspective and show that it is possible to use the already necessary sensing infrastructure to estimate the uncertain quantities in real time. Specifically, resorting to the store-and-forward model, we design a novel network-wide traffic-responsive strategy that estimates the occupancy and exogenous demand in each link, i.e., entering (exiting) vehicle flows at the origins (destinations) of the network or within links, in real time. Borrowing from optimal control theory, we design an optimal linear quadratic control scheme, consisting of a linear feedback term, of the occupancy of the road links, and a feedforward component, which accounts for the varying exogenous vehicle load on the network. Thereby, the resulting control scheme is a simple feedback–feedforward controller, which is fed with occupancy and exogenous demand estimates, and is suitable for real-time implementation. Numerical simulations for the urban traffic network of Chania, Greece, show that, for realistic surges in the exogenous demand, the proposed solution significantly outperforms tried-and-tested solutions that ignore the exogenous demand.
BibTeX
@article{PedrosoBatistaEtAl2024FeedbackFeedforward,
author = {L. Pedroso and P. Batista and M. Papageorgiou},
title = {Feedback–feedforward signal control with exogenous demand estimation in congested urban road networks},
journal = {Transportation Research Part C: Emerging Technologies},
year = {2024},
volume = {169},
pages = {104863},
doi = {10.1016/j.trc.2024.104863}
}

Abstract
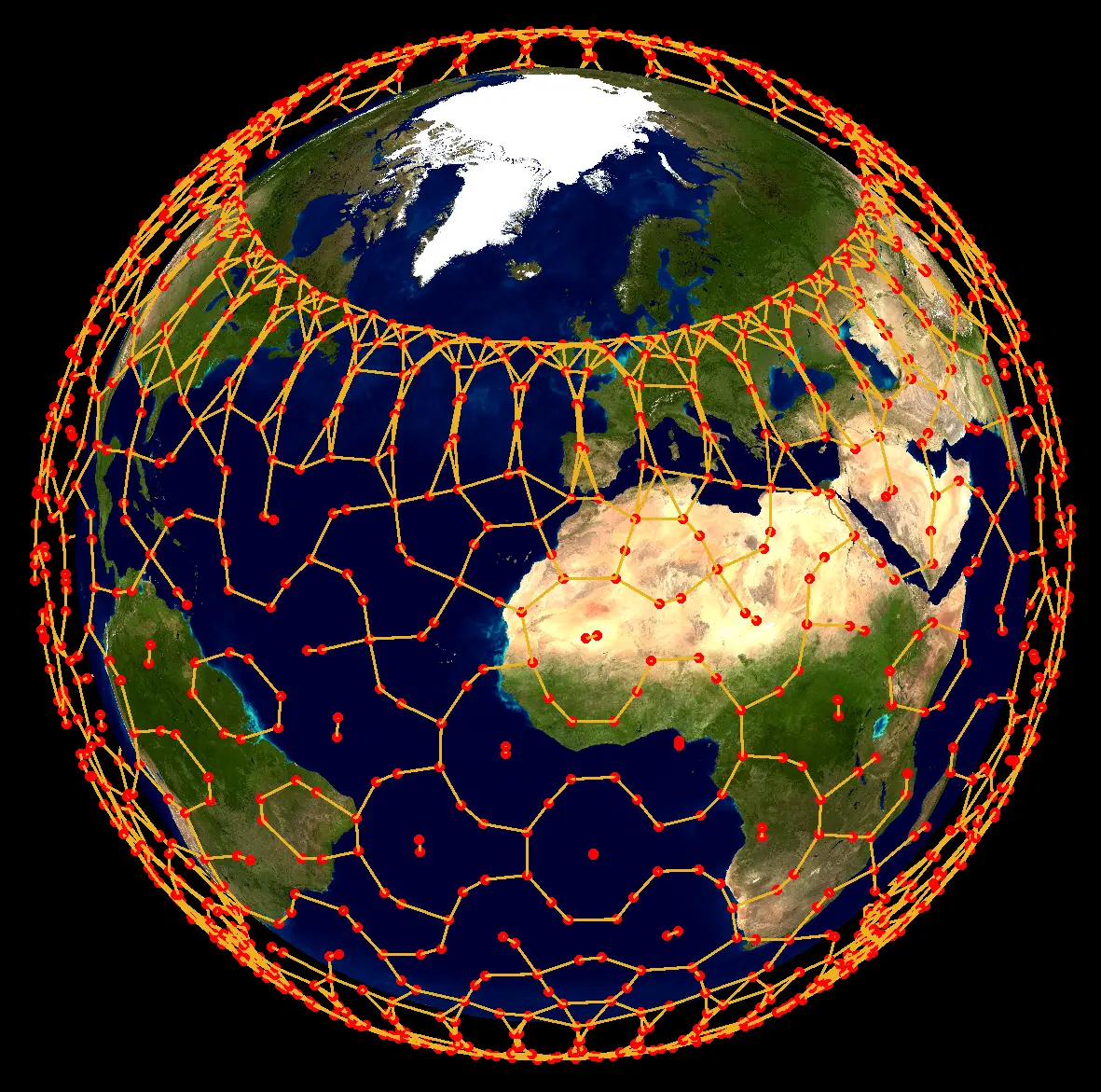
The implementation feasibility of control algorithms over very large-scale networks calls for hard constraints regarding communication, computational, and memory requirements. In this paper, the decentralized receding horizon control problem for very large-scale networks of dynamically decoupled systems with a common, possibly time-varying, control objective is addressed. Each system is assumed to be modeled by linear time-varying dynamics, which can be leveraged to approximate nonlinear systems about successive points of operation. A distributed and decentralized receding horizon control solution is put forward, which: (i) takes communication delays into account; (ii) allows local communication exclusively; and (iii) whose computational and memory requirements in each computational unit do not scale with the dimension of the network. The scalability of the proposed solution enables emerging very large-scale applications of swarm robotics and networked control. This approach is applied to the orbit control problem of low Earth orbit mega-constellations, featuring high-fidelity numerical simulations for the Starlink mega-constellation.
BibTeX
@article{PedrosoBatista2023DistributedRHC,
author = {L. Pedroso and P. Batista},
title = {Distributed decentralized receding horizon control for very large-scale networks with application to satellite mega-constellations},
journal = {Control Engineering Practice},
year = {2023},
volume = {141},
pages = {105728},
doi = {10.1016/j.conengprac.2023.105728}
}
Abstract
The design of a decentralized and distributed filtering solution for large-scale networks of interconnected systems is addressed considering (i) generic nonlinear dynamics and (ii) generic coupled nonlinear outputs in a generic, possibly time-varying, topology. The local filters, which follow the structure of the extended Kalman filter, are implemented in each system, which estimates its own state exclusively. To be suitable for the heavily restricted implementation to very large-scale systems, a novel algorithm is proposed, which: (i) does not rely on instantaneous data transmission; (ii) allows local communication exclusively; and (iii) requires computational, memory, and data transmission resources for each system that do not scale with the dimension of the network. The scalability of the proposed algorithm allows for its application to the cooperative localization problem of very large-scale systems. In particular, it is applied herein to the on-board position estimation problem of LEO mega-constellations using GNSS featuring numerical simulations for the Starlink constellation.
BibTeX
@article{PedrosoBatista2023DistributedEKF,
author = {L. Pedroso and P. Batista},
title = {Distributed decentralized {EKF} for very large-scale networks with application to satellite mega-constellations navigation},
journal = {Control Engineering Practice},
year = {2023},
volume = {135},
pages = {105509},
doi = {10.1016/j.conengprac.2023.105509}
}
Abstract
This paper addresses the problem of designing a decentralized state estimation solution for a large-scale network of interconnected unconstrained linear time invariant (LTI) systems. The problem is tackled in a novel moving horizon estimation (MHE) framework, while taking into account the limited communication capabilities and the restricted computational power and memory, which are distributed across the network. The proposed design is motivated by the fact that, in a decentralized setting, a Luenberguer-based framework is unable to leverage the full potential of the available local information. A method is derived to solve a relaxed version of the resulting optimization problem. It can be synthesized offline and its stability can be assessed prior to deployment. It is shown that the proposed approach allows for significant improvement on the performance of recent Luenberger-based filters. Furthermore, we show that a state-of-the-art distributed MHE solution with comparable requirements underperforms in comparison to the proposed solution.
BibTeX
@article{PedrosoBatista2023DecentralizedMHE,
author = {L. Pedroso and P. Batista},
title = {Decentralized moving horizon estimation for large-scale networks of interconnected unconstrained linear systems},
journal = {IEEE Transactions on Control of Network Systems},
year = {2023},
volume = {10},
number = {4},
pages = {1855-1866},
doi = {10.1109/TCNS.2023.3244086}
}
Abstract
This article addresses the problem of designing a decentralized control solution for a network of agents modeled by linear time-varying (LTV) dynamics, in a discrete-time framework. A general scheme is proposed, in which the problem is formulated as a classical linear quadratic regulator problem, for the global system, subject to a given sparsity constraint on the gain, which reflects the decentralized nature of the network. A method able to compute a sequence of well-performing stabilizing regulator gains is presented and validated resorting to simulations of two randomly generated LTV systems, one stable and the other unstable. Moreover, a tracking solution is developed, building on the solution to the regulator problem. Both methods rely on a closed-form solution, thus they can be computed very rapidly. Similarly to the centralized solution, both the presented methods require that a window of the future system dynamics is known. Both methods are validated resorting to simulations of: (i) a nonlinear network of four interconnected tanks; and (ii) a large-scale nonlinear network of interconnected tanks. When implemented to a nonlinear network, approximated by an LTV system, the proposed methods are able to compute well-performing gains that track the desired output. Finally, both algorithms are scalable, being adequate for implementation in large-scale networks.
BibTeX
@article{PedrosoBatista2023DecentralizedLQR,
author = {L. Pedroso and P. Batista},
title = {Discrete-time decentralized linear quadratic control for linear time-varying systems},
journal = {International Journal of Robust and Nonlinear Control},
year = {2023},
volume = {33},
number = {1},
pages = {67-101},
doi = {10.1002/rnc.5772}
}
Abstract
The major hurdle in accessing laboratory experimentation is the cost of acquiring experimental scientific equipment, which is unbearable for many institutions. This paper aims to provide the community of control educators, practitioners, and researchers with an open-source low-cost experimental setup and dedicated interface, which is flexible and very easily reproducible. The proposed apparatus is a setup of four interconnected tanks. The setup is representative of real-life industrial processes and it can be adjusted to allow for several configurations for flexibility. A user-friendly dedicated MATLAB/Simulink interface with a personal computer is developed. It supports a seamless shift between a numeric simulation of the quadruple-tank process dynamics and the interface with the physical experimental plant. The CAD models, technical drawings, wiring schematics, PCB design, interface, assembly tutorials, and several examples are provided in an open-source repository. The parts are inexpensive, readily obtained, and fast to assemble. Each setup costs under 650€ and takes roughly 4 h to assemble. In this paper, several application examples are presented, not only for educational purposes, but also for the validation of a state-of-the-art decentralized control method.
BibTeX
@article{PedrosoBatista2022Quadruple-tank,
author = {L. Pedroso and P. Batista},
title = {Reproducible low-cost flexible quadruple-tank process experimental setup for control educators, practitioners, and researchers},
journal = {Journal of Process Control},
year = {2022},
volume = {118},
pages = {82-94},
doi = {10.1016/j.jprocont.2022.08.010}
}
Abstract
This paper addresses the problem of designing distributed state estimation solutions for a network of interconnected systems modelled by linear time-varying (LTV) dynamics in a discrete-time framework. The problem is formulated as a classical optimal estimation problem, for the global system, subject to a given sparsity constraint on the filter gain, which reflects the distributed nature of the network. Two methods are presented, both of them able to compute a sequence of well-performing stabilising gains. Moreover, both methods are validated by resorting to simulations of: (i) a randomly generated synthetic LTV system; and (ii) a large-scale nonlinear network of interconnected tanks. One of the proposed methods relies on a computationally efficient solution, thus it is computed very rapidly. The other achieves better performance, but it is computationally more expensive and requires that a window of the future dynamics of the system is known. When implemented to a nonlinear network, approximated by an LTV system, the proposed methods are able to compute well-performing gains that stabilise the estimation error dynamics. Both algorithms are scalable, being adequate for implementation in large-scale networks.
BibTeX
@article{PedrosoBatistaEtAl2022DistributedKalman,
author = {L. Pedroso and P. Batista and P. Oliveira and C. Silvestre},
title = {Discrete-time distributed {Kalman} filter design for networks of interconnected systems with linear time-varying dynamics},
journal = {International Journal of Systems Science},
year = {2022},
volume = {53},
number = {6},
pages = {1334-1351},
doi = {10.1080/00207721.2021.2002461}
}
Abstract
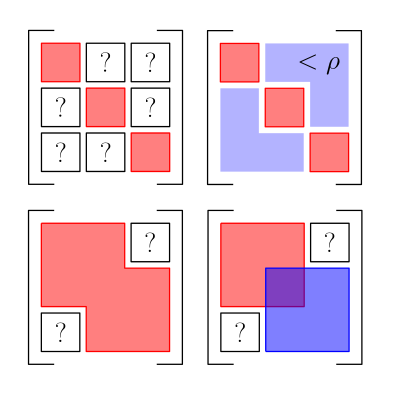
This paper aims to explore a new technique for structural damage identification using cubic spline interpolation. The method is based on the interpolation of modal rotations measured with shearography, making use of the analytical derivative of the spline to compute the modal curvature, which is known to be very sensitive to damage. As a means of reducing noise and measurement uncertainty propagation to a minimum, an expression for an optimal spatial sampling is derived. Furthermore, a baseline-free damage factor, allied with an optimal sampling, is also introduced. The proposed identification method is validated using experimental data of a beam. Using a damage localisation quality index, a comparison between the present method and one using finite differences is carried out, showing that the differentiation of spline interpolation leads to better damage identifications. The results obtained with the proposed approach show robustness and consistency in the localisations. Additionally, the hurdles of identifying small and multiple damage are tackled with the proposed method, yielding a good performance.
BibTeX
@article{PedrosoArcoEtAl2022Spline,
author = {L. Pedroso and A. Arco and I. Figueiras and J. V. A. dos Santos and J. L. M. Fernandes and H. Lopes},
title = {Application of cubic spline interpolation with optimal spatial sampling for damage identification},
journal = {Structural Control and Health Monitoring},
year = {2022},
volume = {29},
number = {1},
pages = {e2856},
doi = {10.1002/stc.2856}
}
Abstract
Signal control strategies for congested urban road networks designed in a centralized framework require many communication links, serious processing power, and infrastructure for the centralized coordination. As a result, strategies based on a centralized framework are not scalable. The use of decentralized signal control strategies for large-scale urban traffic networks is a solution to this problem, since it allows for the implementation of such strategies on networks whose centralized solution is not easily scalable. This paper addresses the problem of designing a decentralized traffic-responsive signal control solution, proposing two methods based on different formulations of the store-and-forward model: (i) the Decentralized Traffic-responsive Urban Control (DTUC) method; and (ii) the Decentralized Decoupled Traffic-responsive Urban Control (D2TUC). The decentralized configuration is such that each intersection is associated with one computational unit, with limited computational power and memory, which controls the traffic signals of the incoming links. Sufficient conditions for the controllability of the considered store-and-forward models are also presented. Both methods are validated resorting to numerical simulations of the urban traffic network of Chania, Greece, for two demand scenarios, and their performance is compared with the performance of the Traffic-responsive Urban Control (TUC) centralized strategy. One of the proposed decentralized methods, D2TUC, is shown to match the performance of TUC.
BibTeX
@article{PedrosoBatista2021SignalControl,
author = {L. Pedroso and P. Batista},
title = {Decentralized store-and-forward based strategies for the signal control problem in large-scale congested urban road networks},
journal = {Transportation Research Part C: Emerging Technologies},
year = {2021},
volume = {132},
pages = {103412},
doi = {10.1016/j.trc.2021.103412}
}
Abstract
In this short communication, an algorithm for efficiently solving a sparse matrix equation, which arises frequently in the field of distributed control and estimation theory, is proposed. The efficient algorithm stems from the fact that the sparse equation at hand can be reduced to a system of linear equations. The proposed algorithm is shown to require significantly fewer floating point operations than the state-of-the-art solution. The proposed solution is applied to a real-life example, which models a wide range of industrial processes. The experimental results show that the solution put forward allows for a significant increase in efficiency in relation to the state-of-the-art solution. The significant increase in efficiency of the presented algorithm allows for a valuable widening of the applications of distributed estimation and control.
BibTeX
@article{PedrosoBatista2021SparseEquation,
author = {L. Pedroso and P. Batista},
title = {Efficient Algorithm for the Computation of the Solution to a Sparse Matrix Equation in Distributed Control Theory},
journal = {Mathematics},
year = {2021},
volume = {9},
number = {13},
doi = {10.3390/math9131497}
}
Preprints
Abstract
Covariance intersection (CI) methods provide a principled approach to fusing estimates with unknown cross-correlations by minimizing a worst-case measure of uncertainty that is consistent with the available information. This paper introduces a generalized CI framework, called overlapping covariance intersection (OCI), which unifies several existing CI formulations within a single optimization-based framework. This unification enables the characterization of family-optimal solutions for multiple CI variants, including standard CI and split covariance intersection (SCI), as solutions to a semidefinite program, for which efficient off-the-shelf solvers are available. When specialized to the corresponding settings, the proposed family-optimal solutions recover the state-of-the-art family-optimal solutions previously reported for CI and SCI. The resulting formulation facilitates the systematic design and real-time implementation of CI-based fusion methods in large-scale distributed estimation problems, such as cooperative localization.
BibTeX
@misc{PedrosoBatistaEtAl2026UnificationCI,
author = {L. Pedroso and W. P. M. H. Heemels and P. Batista},
title = {A Unified Family-optimal Solution to Covariance Intersection Problems with Semidefinite Programming},
note = {arXiv preprint arXiv:2603.20402},
year = {2026},
doi = {10.48550/arXiv.2603.20402}
}
Abstract
Emerging large-scale engineering systems rely on distributed fusion for situational awareness, where agents combine noisy local sensor measurements with exchanged information to obtain fused estimates. However, at the sheer scale of these systems, tracking cross-correlations becomes infeasible, preventing the use of optimal filters. Covariance intersection (CI) methods address fusion problems with unknown correlations by minimizing worst-case uncertainty based on available information. Existing CI extensions exploit limited correlation knowledge but cannot incorporate structural knowledge of correlation from multiple sources, which naturally arises in distributed fusion problems. This paper introduces Overlapping Covariance Intersection (OCI), a generalized CI framework that accommodates this novel information structure. We formalize the OCI problem and establish necessary and sufficient conditions for feasibility. We show that a family-optimal solution can be computed efficiently via semidefinite programming, enabling real-time implementation. The proposed tools enable improved fusion performance for large-scale systems while retaining robustness to unknown correlations.
BibTeX
@misc{PedrosoBatistaEtAl2026OCI,
author = {L. Pedroso and P. Batista and W. P. M. H. Heemels},
title = {Overlapping Covariance Intersection: Fusion with Partial Structural Knowledge of Correlation from Multiple Sources},
note = {arXiv preprint arXiv:2603.16768},
year = {2026},
doi = {10.48550/arXiv.2603.16768}
}
Abstract
Self-interested behavior in sharing economies often leads to inefficient aggregate outcomes compared to a centrally coordinated allocation, ultimately harming users. Yet, centralized coordination removes individual decision power. This issue can be addressed by designing rules that align individual preferences with system-level objectives. Unfortunately, rules based on conventional monetary mechanisms introduce unfairness by discriminating among users based on their wealth. To solve this problem, in this paper, we propose a token-based mechanism for congestion games that achieves efficient and fair dynamic resource allocation. Specifically, we model the token economy as a continuous-time dynamic game with finitely many boundedly rational agents, explicitly capturing their evolutionary policy-revision dynamics. We derive a mean-field approximation of the finite-population game and establish strong approximation guarantees between the mean-field and the finite-population games. This approximation enables the design of integer tolls in closed form that provably steer the aggregate dynamics toward an optimal efficient and fair allocation from any initial condition.
BibTeX
@misc{PedrosoAgazziEtAl2026TokenEconomy,
author = {L. Pedroso and A. Agazzi and W. P. M. H. Heemels and M. Salazar},
title = {Token Economy for Fair and Efficient Dynamic Resource Allocation in Congestion Games},
note = {arXiv preprint arXiv:2603.18094},
year = {2026},
doi = {10.48550/arXiv.2603.18094}
}
Abstract
We study a dynamic game with a large population of players who choose actions from a finite set in continuous time. Each player has a state in a finite state space that evolves stochastically with their actions. A player's reward depends not only on their own state and action but also on the distribution of states and actions across the population, capturing effects such as congestion in traffic networks. In Part I, we introduced an evolutionary model and a new solution concept - the mixed stationary Nash Equilibrium (MSNE) - which coincides with the rest points of the mean field evolutionary model under meaningful families of revision protocols. In this second part, we investigate the evolutionary stability of MSNE. We derive conditions on both the structure of the MSNE and the game’s payoff map that ensure local and global stability under evolutionary dynamics. These results characterize when MSNE can robustly emerge and persist against strategic deviations, thereby providing insight into its long-term viability in large population dynamic games.
BibTeX
@misc{PedrosoAgazziEtAl2025MFGAvgII,
author = {L. Pedroso and A. Agazzi and W. P. M. H. Heemels and M. Salazar},
title = {Evolutionary Dynamics in Continuous-time Finite-state Mean Field Games - {Part II}: Stability},
note = {arXiv preprint arXiv:2511.03297},
year = {2025},
doi = {10.48550/arXiv.2511.03297}
}
Abstract
We study a dynamic game with a large population of players who choose actions from a finite set in continuous time. Each player has a state in a finite state space that evolves stochastically with their actions. A player's reward depends not only on their own state and action but also on the distribution of states and actions across the population, capturing effects such as congestion in traffic networks. While prior work in evolutionary game theory has primarily focused on static games without individual player state dynamics, we present the first comprehensive evolutionary analysis of such dynamic games. We propose an evolutionary model together with a mean field approximation of the finite-population game and establish strong approximation guarantees. We show that standard solution concepts for dynamic games lack an evolutionary interpretation, and we propose a new concept - the Mixed Stationary Nash Equilibrium (MSNE) - which admits one. We analyze the relationship between MSNE and the rest points of the mean field evolutionary model and study the evolutionary stability of MSNE.
BibTeX
@misc{PedrosoAgazziEtAl2025MFGAvg,
author = {L. Pedroso and A. Agazzi and W. P. M. H. Heemels and M. Salazar},
title = {Evolutionary Dynamics in Continuous-time Finite-state Mean Field Games - {Part I}: Equilibria},
note = {arXiv preprint arXiv:2511.01452},
year = {2025},
doi = {10.48550/arXiv.2511.01452}
}
International Conference Papers
Abstract
We consider a class of continuous-time dynamic games involving a large number of players. Each player selects actions from a finite set and evolves through a finite set of states. State transitions occur stochastically and depend on the player’s chosen action. A player’s single-stage reward depends on their state, action, and the population-wide distribution of states and actions, capturing aggregate effects such as congestion in traffic networks. Each player seeks to maximize a discounted infinite-horizon reward. Existing evolutionary game-theoretic approaches introduce a model for the way individual players update their decisions in static environments without individual state dynamics. In contrast, this work develops an evolutionary framework for dynamic games with explicit state evolution, which is necessary to model many applications. We introduce a mean field approximation of the finite-population game and establish approximation guarantees. Since state-of-the-art solution concepts for dynamic games lack an evolutionary interpretation, we propose a new concept - the Mixed Stationary Nash Equilibrium (MSNE) - which admits one. We characterize an equivalence between MSNE and the rest points of the proposed mean field evolutionary model and we give conditions for the evolutionary stability of MSNE.
BibTeX
@inproceedings{PedrosoAgazziEtAl2026MFGDisc,
author = {L. Pedroso and A. Agazzi and W. P. M. H. Heemels and M. Salazar},
title = {Evolutionary Analysis of Continuous-time Finite-state Mean Field Games with Discounted Payoffs},
booktitle = {2026 European Control Conference (ECC)},
year = {2026},
doi = {10.48550/arXiv.2511.07655},
note = {arXiv preprint arXiv:2511.07655 (accepted for presentation)}
}
Abstract
When users access shared resources in a selfish manner, the resulting societal cost and perceived users' cost is often higher than what would result from a centrally coordinated optimal allocation. While several contributions in mechanism design manage to steer the aggregate users choices to the desired optimum by using monetary tolls, such approaches bear the inherent drawback of discriminating against users with a lower income. More recently, incentive schemes based on artificial currencies have been studied with the goal of achieving a system-optimal resource allocation that is also fair. In this resource-sharing context, this paper focuses on repeated weighted congestion game with two resources, where users contribute to the congestion to different extents that are captured by individual weights. First, we address the broad concept of fairness by providing a rigorous mathematical characterization of the distinct societal metrics of equity and equality, i.e., the concepts of providing equal outcomes and equal opportunities, respectively. Second, we devise weight-dependent and time-invariant optimal pricing policies to maximize equity and equality, and prove convergence of the aggregate user choices to the system-optimum. In our framework it is always possible to achieve system-optimal allocations with perfect equity, while the maximum equality that can be reached may not be perfect, which is also shown via numerical simulations.
BibTeX
@inproceedings{PedrosoAgazziEtAl2024EqtEql,
author = {L. Pedroso and A. Agazzi and W. P. M. H. Heemels and M. Salazar},
title = {Fair Artificial Currency Incentives in Repeated Weighted Congestion Games: Equity vs. Equality},
booktitle = {63rd IEEE Conference on Decision and Control},
year = {2024},
pages = {954-959},
doi = {10.1109/CDC56724.2024.10886786}
}
Abstract
Research on the operation of mobility systems so far has mostly focused on minimizing cost-centered metrics such as average travel time, distance driven, and operational costs. Whilst capturing economic indicators, such metrics do not account for transportation justice aspects. In this paper, we present an optimization model to plan the operation of Intermodal Autonomous Mobility-on-Demand (I-AMoD) systems, where self-driving vehicles provide on-demand mobility jointly with public transit and active modes, with the goal to minimize the accessibility unfairness experienced by the population. Specifically, we first leverage a previously developed network flow model to compute the I-AMoD system operation in a minimum-time manner. Second, we formally define accessibility unfairness, and use it to frame the minimum-accessibility-unfairness problem and cast it as a linear program. We showcase our framework for a real-world case-study in the city of Eindhoven, NL. Our results show that it is possible to reach an operation that is on average fully fair at the cost of a slight travel time increase compared to a minimum-travel-time solution. Thereby we observe that the accessibility fairness of individual paths is, on average, worse than the average values obtained from flows, setting the stage for a discussion on the definition of accessibility fairness itself.
BibTeX
@inproceedings{SalazarBetancurEtAl2024Acc,
author = {M. Salazar and S. Betancur Giraldo and F. Paparella and L. Pedroso},
title = {On Accessibility Fairness in Intermodal Autonomous Mobility-on-Demand Systems},
booktitle = {Proc.\ of the IFAC Symposium on Control in Transportation Systems},
year = {2024},
volume = {58},
number = {10},
pages = {327-333},
doi = {10.1016/j.ifacol.2024.07.361}
}
Abstract
This paper presents a modeling and optimization framework to study congestion-aware ride-pooling Autonomous Mobility-on-Demand (AMoD) systems, whereby self-driving robotaxis are providing on-demand mobility, and users headed in the same direction share the same vehicle for part of their journey. Specifically, taking a mesoscopic time-invariant perspective and on the assumption of a large number of travel requests, we first cast the joint ride-pooling assignment and routing problem as a quadratic program that does not scale with the number of demands and can be solved with off-the-shelf convex solvers. Second, we compare the proposed approach with a significantly simpler decoupled formulation, whereby only the routing is performed in a congestion-aware fashion, whilst the ride-pooling assignment part is congestion-unaware. A case study of Sioux Falls reveals that such a simplification does not significantly alter the solution and that the decisive factor is indeed the congestion-aware routing. Finally, we solve the latter problem accounting for the presence of user-centered private vehicle users in a case study of Manhattan, NYC, characterizing the performance of the car-network as a function of AMoD penetration rate and percentage of pooled rides within it. Our results show that AMoD can significantly reduce congestion and travel times, but only if at least 40% of the users are willing to be pooled together. Otherwise, for higher AMoD penetration rates and low percentage of pooled rides, the effect of the additional rebalancing empty-vehicle trips can be even more detrimental than the benefits stemming from a centralized routing, worsening congestion and leading to an up to 15% higher average travel time.
BibTeX
@inproceedings{PaparellaPedrosoEtAl2024Congestion,
author = {F. Paparella and L. Pedroso and T. Hofman and M. Salazar},
title = {Congestion-aware Ride-pooling in Mixed Traffic for Autonomous Mobility-on-Demand Systems},
booktitle = {2024 European Control Conference (ECC)},
year = {2024},
pages = {992-999},
doi = {10.23919/ECC64448.2024.10591041}
}
Abstract
Within mobility systems, the presence of self-interested users can lead to aggregate routing patterns that are far from the societal optimum which could be achieved by centrally controlling the users' choices. In this paper, we design a fair incentive mechanism to steer the selfish behavior of the users to align with the societally optimal aggregate routing. The proposed mechanism is based on an artificial currency that cannot be traded or bought, but only spent or received when traveling. Specifically, we consider a parallel-arc network with a single origin and destination node within a repeated game setting whereby each user chooses from one of the available arcs to reach their destination on a daily basis. In this framework, taking faster routes comes at a cost, whereas taking slower routes is incentivized by a reward. The users are thus playing against their future selves when choosing their present actions. To capture this complex behavior, we assume the users to be rational and to minimize an urgency-weighted combination of their immediate and future discomfort. To design the optimal pricing, we first derive a closed-form expression for the best individual response strategy. Second, we formulate the pricing design problem for each arc to achieve the societally optimal aggregate flows, and reformulate it so that it can be solved with gradient-free optimization methods. Our numerical simulations show that it is possible to achieve a near-optimal routing whilst significantly reducing the users' perceived discomfort when compared to a centralized optimal but urgency-unaware policy.
BibTeX
@inproceedings{PedrosoHeemelsEtAl2023KarmaParallel,
author = {L. Pedroso and W. P. M. H. Heemels and M. Salazar},
title = {Urgency-aware Routing in Single Origin-destination Itineraries through Artificial Currencies},
booktitle = {62nd IEEE Conference on Decision and Control},
year = {2023},
pages = {4142-4149},
doi = {10.1109/CDC49753.2023.10383739}
}
Abstract
This paper presents a time-invariant network flow model capturing two-person ride-pooling that can be integrated within design and planning frameworks for Mobility-on-Demand systems. In these type of models, the arrival process of travel requests is described by a Poisson process, meaning that there is only statistical insight into request times, including the probability that two requests may be pooled together. Taking advantage of this feature, we devise a method to capture ride-pooling from a stochastic mesoscopic perspective. This way, we are able to transform the original set of requests into an equivalent set including pooled ones which can be integrated within standard network flow problems, which in turn can be efficiently solved with off-the-shelf LP solvers for a given ride-pooling request assignment. Thereby, to compute such an assignment, we devise a polynomial-time algorithm that is optimal w.r.t. an approximated version of the problem. Finally, we perform a case study of Sioux Falls, USA, where we quantify the effects that waiting time and experienced delay have on the vehicle-hours traveled. Our results suggest that the higher the demands per unit time, the lower the waiting time and delay experienced by users. In addition, for a sufficiently large number of demands per unit time, with a maximum waiting time and experienced delay of 5 minutes, more than 90% of the requests can be pooled.
BibTeX
@inproceedings{PaparellaPedrosoEtAl2023TwoRide-pooling,
author = {F. Paparella and L. Pedroso and T. Hofman and M. Salazar},
title = {A Time-invariant Network Flow Model for Two-person Ride-pooling Mobility-on-Demand},
booktitle = {62nd IEEE Conference on Decision and Control},
year = {2023},
pages = {4118-4123},
doi = {10.1109/CDC49753.2023.10384279}
}
Abstract
The SAFFRON toolbox is introduced to synthesize, analyze, and simulate store-and-forward based strategies for the signal control problem in congested urban road networks in MATLAB. It features: i) well-documented tools to manipulate and simulate store-and-forward macroscopic traffic network models; ii) the parameters of the model of the urban road network of the city center of Chania, Greece; and iii) the implementation of state-of-the-art signal control strategies.
BibTeX
@inproceedings{PedrosoBatistaEtAl2022Saffron,
author = {L. Pedroso and P. Batista and M. Papageorgiou and E. Kosmatopoulos},
title = {{SAFFRON}: {Store-And-Forward} model toolbox {For} urban {ROad} {Network} signal control in {MATLAB}},
booktitle = {2022 IEEE 25th International Conference on Intelligent Transportation Systems (ITSC)},
year = {2022},
pages = {3698-3703},
doi = {10.1109/ITSC55140.2022.9922508}
}
Abstract
This paper aims to explore a new technique for structural damage identification using cubic spline interpolation. The method is based on the interpolation of modal rotations measured with speckle shearography. In order to locate the damaged areas, we make use of the analytical derivative of the cubic spline function to compute the modal curvature, which is known to be very sensitive to damage. A comprehensive parametric study of the spatial sampling interval is carried out to find its influence on noise filtering. Furthermore, the identification quality dependency on the mode shape and respective noise is also examined. The results obtained with the proposed method show the consistency of the localizations. Additionally, the challenging tasks of identifying small and multiple damage are tackled, yielding a good performance.
BibTeX
@inproceedings{ArcoFigueirasEtAl2019Spline,
author = {A. Arco and I. Figueiras and L. Pedroso and J. V. {Araújo dos Santos} and J. L. M. Fernandes and H. Lopes},
title = {Application of spline interpolation to speckle shearography measurements for damage identification},
booktitle = {3rd International Conference on Structural Integrity (ICSI 2019)},
year = {2019},
volume = {17},
pages = {718-725},
doi = {10.1016/j.prostr.2019.08.096}
}
Theses
Abstract
The advantages and tremendous potential of very large-scale complex networks of interconnected systems are indisputable in a myriad of engineering fields, not only as business opportunities but also as a natural change towards efficiency, reliability, and scalability. In particular, mega-constellations of satellites promise to revolutionize the future of communications and Earth observation and monitoring. Although efforts towards the deployment of these solutions are underway, decades-old tried and tested individual ground-based tracking telemetry and command technologies condemn these ventures to practical unfeasibility and economic unviability. The goal of this thesis follows from the self-evident void in the state-of-the-art, aiming to bring these endeavors to fruition. First, the distributed and decentralized control problem is formulated in a receding horizon control framework alongside the severe large-scale feasibility constraints. Second, a convex relaxation procedure is proposed to approximate the optimal solution of the regulator synthesis problem in a decentralized setting, which is validated resorting to a large-scale numeric simulation and experimental results. Moreover, a tracking solution is put forward. Third, a novel distributed and decentralized networked control solution is developed for the particular case of dynamically decoupled systems. The controller synthesis computations are distributed across the network leveraging the proposed convex relaxation, an approximation, and a scheduling procedure, to comply with the feasibility constraints on a very large-scale. Fourth, the potential of the proposed solution is successfully illustrated for the cooperative on-board orbit control of the Starlink mega-constellation. The shape-keeping task is formulated in a novel framework with emphasis on efficiency and fuel saving.
BibTeX
@mastersthesis{Pedroso2022Thesis,
author = {L. Pedroso},
title = {Distributed decentralized control for very large-scale systems with application to {LEO} satellite mega-constellations},
year = {2022},
school = {Instituto Superior Técnico, University of Lisbon}
}